What Move_UK was about
Over the past few years, a fleet of somewhat special cars has roamed the streets of Greenwich, London. Covering almost 200,000 kilometers and accumulating half a terabyte of data, these vehicles were part of the Move_UK project. Its objective was to find new methods of validating connected systems for automated driving to save time and reduce costs. Let’s now review the results of this recently concluded three-year project.
“Move_UK was a project that combined two topics: connectivity and big data analysis,” says Kia Hafezi, the project’s technical director. Like any other normal car, those used in the Move_UK project had a driver behind the wheel. The difference was that these cars were equipped with a stereo camera, a radar sensor and corner radar sensors – to detect vehicles approaching from the side – and used them to record events during their journeys. The recorded data was processed in a backend system and displayed in a user interface (UI) for validation.
To illustrate this with a practical example: Imagine a car overtakes and cuts in front of the test vehicle, forcing the driver to step hard on the brakes. The incident is recorded by the built-in camera and sensors. The camera and sensor data are transmitted to the backend system for analysis. On the basis of this kind of information, automated vehicles can be taught how to respond in similar situations.
How is all this data managed?
One of the biggest challenges posed by autonomous driving is how to analyze the huge quantity of data generated by the vehicle. As Hafezi explains: “We need intelligent approaches to deal with the increasing volume of sensor data. How can we manage these data and use them efficiently to validate the results of the systems?”
The solution chosen in the Move_UK project was to record data only at critical points in the journey. “We tested a concept in which a trigger must activate the recording,” says Hafezi. “Consequently, data are only recorded and transmitted to the backend when a specific event occurs.”
An example of this type of event is an emergency braking maneuver in which the vehicle’s brake assist system is activated. “We made the assumption that an emergency braking maneuver would be relatively seldom in the three-year test period. And consequently, we didn’t see much point in defining such critical situations as the sole triggers,” says Hafezi. “We therefore decided to use subcritical situations as additional triggers. Moreover, we chose a number of parameters that define certain actions by the driver as triggers. For instance, stepping down hard on the brake pedal in any situation is enough to start the recorder.”
The technical aspects of Move_UK
The data generated by the sensors was transmitted to a server via Wi-Fi and the cellular network for input to the software backend. This part of the solution was handled by Bosch IoT Insights, the Bosch IoT Suite’s data management service. It received the data and processed it into a format that could be displayed on a user interface (UI). “The data could be consulted online mere seconds after it had arrived at the backend,” says Tobias Keller, general project manager for the Bosch IoT Insights team.
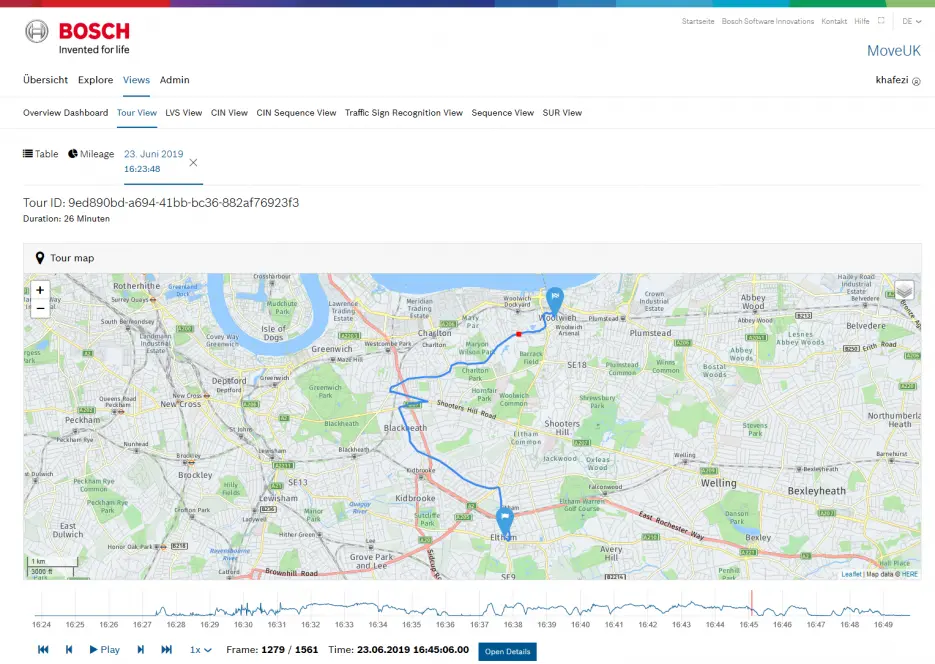
One particularity of the Move_UK project was that data from different sensors was processed together. “We synchronized different data streams in Bosch IoT Insights, for instance combining video and radar data,” explains Keller. “The vehicle’s position was shown on a map on the UI. The data from the video camera made it possible to see what the driver was seeing. At the same time, it was known what the radar had detected. By correlating the two sets of data, it was possible to verify precisely what had happened when the radar reported an event.”
Kia Hafezi adds that the modular structure of Bosch IoT Insights played a decisive role in the project. “Some modules provided general information, such as the vehicle’s location, while others collected data for deeper analysis. In this way, everyone could select the aspects of most interest to them. This modular structure made Bosch IoT Insights the perfect tool for the job.”
The key findings three years on
What lessons were learned from the Move_UK project? Apart from observations concerning specific driving situations, Hafezi cites two key findings that came to light. One is that the project proved the feasibility of processing data immediately after it has been collected. “We were able to analyze the data very shortly after it had been recorded.”
Another thing that became apparent was that in certain cases it wasn’t necessary to record data continuously in order to validate systems for automated driving. “We set out to determine whether an event-based approach to data recording could be a reliable, alternative method of validation. And we proved that it is.”